RaspberryPi Zero 2w
Raspberry Pi Zero 2w로 구현하는 CCTV
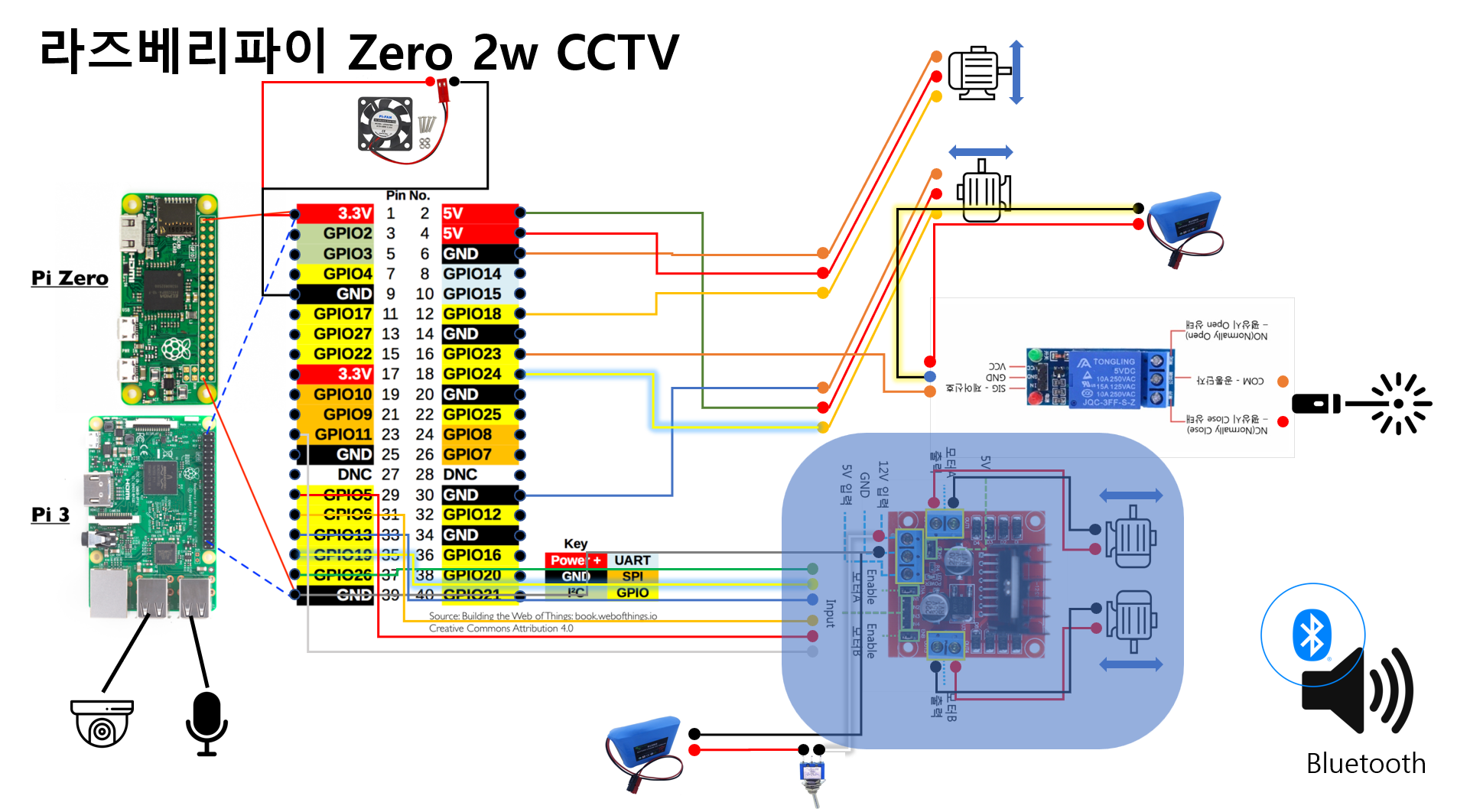
- 연결 구성도
- Start and Stop Shell
- Main Python 프로그램 [serverUsb.py]
- USB Camera [usbwebcamera.py]
- GPIO 프로그램 [gpioControl.py]
- 듣기와 번역하여 말하기 프로그램 [listenSpeech.py]
- 화면 캡쳐 [capture.py]
- 기타 프로그램 및 화면 소스
연결 구성도
Start and Stop Shell
Start and Stop Shell
Start Shell
#!/bin/bash
echo
echo '##### START KKo KKo Rack #####'
echo
wpa_cli -i wlan0 status
echo
echo
FILENAME=/home/hyunsu/work/nohup.out
if [ -f "$FILENAME" ] ; then
echo "nohup.out delete !"
rm /home/hyunsu/work/opencv/nohup.out
else
echo "file not exist"
fi
echo '##### START CCTV #####'
cd /home/hyunsu/work/opencv
nohup python3 /home/hyunsu/work/opencv/serverUsb.py &
echo '##### START BROD SOUND #####'
nohup cvlc -vvv alsa://plughw:1 --sout '#transcode{acodec=mp3,ab=64,channels=1}:standard{access=http,dst=0.0.0.0:8080/out.mp3}' 1> /dev/null 2>&1 &
echo
echo '##### STARTed KKo KKo Rack #####'
echo
Stop Shell
#!/bin/bash
echo
echo '##### STOP KKo KKo Rack #####'
echo
ps -ef | grep stepperMoter.py | grep -v grep
KILLPID=`ps -ef | grep serverUsb.py | grep -v grep | awk '{print($2)}'`
echo "Stop CCTV Process = " $KILLPID
kill -9 $KILLPID
ps -ef | grep vlc | grep -v grep
KILLPID=`ps -ef | grep vlc | grep -v grep | awk '{print($2)}'`
echo "Stop Brod Sound Process = " $KILLPID
kill -9 $KILLPID
echo
echo '##### STOPed KKo KKo Rack #####'
echo
Main Python 프로그램 [serverUsb.py]
Main Python 프로그램
serverUsb.py
from flask import Flask, render_template, send_from_directory, Response, request, send_file
# from flask_socketio import SocketIO
from pathlib import Path
from capture import capture_and_save
from usbwebcamera import UsbWebCamera
import argparse, logging, logging.config, conf
import os
from gpioControl import GpioControl
from listenSpeech import ListenSpeech
from urllib.parse import parse_qs
gpio = GpioControl()
archive_path = os.path.join(os.path.dirname(os.path.realpath(__file__)), 'archive')
listenspeech = ListenSpeech()
logging.config.dictConfig(conf.dictConfig)
logger = logging.getLogger(__name__)
usbcamera = UsbWebCamera(20,0)
usbcamera.run()
app = Flask(__name__)
#app.static_url_path = '/home/pi/Work/opencv/templates'
# app.config["SECRET_KEY"] = "secret!"
# socketio = SocketIO(app)
@app.after_request
def add_header(r):
"""
Add headers to both force latest IE rendering or Chrome Frame,
and also to cache the rendered page for 10 minutes
"""
r.headers["Cache-Control"] = "no-cache, no-store, must-revalidate"
r.headers["Pragma"] = "no-cache"
r.headers["Expires"] = "0"
r.headers["Cache-Control"] = "public, max-age=0"
return r
@app.route("/")
def entrypoint1():
logger.debug("Requested /")
return render_template("index.html")
@app.route("/index.html")
def entrypoint2():
logger.debug("Requested /")
return render_template("index.html")
@app.route("/msg", methods=['GET', 'POST'])
def msg():
if request.method == 'POST':
message = request.form['textinput']
if not message :
reString = "No received message"
else :
reString = listenspeech.speech(message)
print("Get Message = " + reString)
return reString
@app.route("/usbcapture")
def captureusb():
logger.debug("Requested capture")
im = usbcamera.get_frame(_bytes=False)
capture_and_save(im)
return render_template("send_to_init.html")
@app.route('/archive')
def archive():
return render_template('archive.html')
def get_type(filename):
name, extension = os.path.splitext(filename)
return 'video' if extension == '.mp4' else 'audio' if extension == '.wav' else 'audio' if extension == '.mp3' else 'photo'
@app.route('/archive/<string:filename>')
def archive_item(filename):
name, extension = os.path.splitext(filename)
type = get_type(filename)
return render_template('record.html', filename=filename, type=type)
@app.route('/archive/delete/<string:filename>')
def archive_delete(filename):
os.remove(archive_path + "/" + filename)
return redirect(url_for('archive'))
@app.route('/archive/play/<string:filename>')
def archive_play(filename):
return send_file('archive/' + filename)
def get_records():
records = []
for filename in sorted(os.listdir(archive_path), reverse=True):
if not filename.startswith('.'):
type = get_type(filename)
size = byte_to_mb(os.path.getsize(archive_path + "/" + filename))
record = {"filename": filename, 'size': size, 'type': type}
records.append(record)
return records
def byte_to_mb(byte):
mb = "{:.2f}".format(byte / 1024 / 1024)
return str(mb) + " MB"
app.jinja_env.globals.update(get_records=get_records)
@app.route("/archive/last")
def last_image():
logger.debug("Requested last image")
p = Path("archive/last.png")
if p.exists():
r = "last.png"
else:
logger.debug("No last image")
r = "not_found.jpeg"
return send_from_directory("archive",r)
def genusb(usbcamera):
logger.debug("Starting USB stream")
while True:
frame = usbcamera.get_frame()
yield (b'--frame\r\n'
b'Content-Type: image/png\r\n\r\n' + frame + b'\r\n')
@app.route("/stream")
def stream_page():
logger.debug("Requested stream page")
return render_template("stream.html")
@app.route("/video_usb_feed")
def video_usb_feed():
return Response(genusb(usbcamera),
mimetype="multipart/x-mixed-replace; boundary=frame")
@app.route("/temperature")
def temperature():
content = os.popen("vcgencmd measure_temp").readline()
content = content.replace("temp=", "")
return Response(content, mimetype='text/xml')
''' ##### Control Camera Section ##### '''
@app.route("/shooting", methods=['GET', 'POST'])
def shooting():
reString = "Shooting : " + gpio.shooting()
return Response(reString, mimetype='text/html')
@app.route("/init")
def init():
reString = "Camera position init : " + gpio.initMotorPosition()
print("Move init ...")
return Response(reString, mimetype='text/html')
@app.route("/up")
def up():
reString = gpio.moveUp()
print("Move Up ...")
return Response(reString, mimetype='text/html')
@app.route("/down")
def down():
reString = gpio.moveDown()
print("Move Down ...")
return Response(reString, mimetype='text/html')
@app.route("/left")
def left():
reString = gpio.moveLeft()
print("Move Left ...")
return Response(reString, mimetype='text/html')
@app.route("/right")
def right():
reString = gpio.moveRight()
print("Move Right ...")
return Response(reString, mimetype='text/html')
''' ##### Caterpillar Tracks ##### '''
@app.route("/forward", methods=['GET', 'POST'])
def forward():
if request.method == 'POST':
moveOrder = request.form['moveCnt']
if not moveOrder :
reString = "Do not move"
else :
reString = gpio.goForward(moveOrder)
print("Go Forward ...("+moveOrder+")")
return reString
@app.route("/backward", methods=['GET', 'POST'])
def backward():
if request.method == 'POST':
moveOrder = request.form['moveCnt']
if not moveOrder :
reString = "Do not move"
else :
reString = gpio.goBackward(moveOrder)
print("Go Backward ...("+moveOrder+")")
return reString
@app.route("/turnleftback", methods=['GET', 'POST'])
def turnleftback():
if request.method == 'POST':
moveOrder = request.form['moveCnt']
if not moveOrder :
reString = "Do not move"
else :
reString = gpio.goTurnleftback(moveOrder)
print("Go Turn Left back...("+moveOrder+")")
return reString
@app.route("/turnrightback", methods=['GET', 'POST'])
def turnrightback():
if request.method == 'POST':
moveOrder = request.form['moveCnt']
if not moveOrder :
reString = "Do not move"
else :
reString = gpio.goTurnrightback(moveOrder)
print("Go Turn Right back...("+moveOrder+")")
return reString
@app.route("/turnleftforward", methods=['GET', 'POST'])
def turnleftforward():
if request.method == 'POST':
moveOrder = request.form['moveCnt']
if not moveOrder :
reString = "Do not move"
else :
reString = gpio.goTurnleftforward(moveOrder)
print("Go Turn Left forward...("+moveOrder+")")
return reString
@app.route("/turnrightforward", methods=['GET', 'POST'])
def turnrightforward():
if request.method == 'POST':
moveOrder = request.form['moveCnt']
if not moveOrder :
reString = "Do not move"
else :
reString = gpio.goTurnrightforward(moveOrder)
print("Go Turn Right forward...("+moveOrder+")")
return reString
if __name__=="__main__":
# socketio.run(app,host="0.0.0.0",port="3005",threaded=True)
parser = argparse.ArgumentParser()
parser.add_argument('-p','--port',type=int,default=8081, help="Running port")
parser.add_argument("-H","--host",type=str,default='0.0.0.0', help="Address to broadcast")
args = parser.parse_args()
logger.debug("Starting server")
#app.run(host=args.host, port=args.port, threaded=True, debug=True)
app.run(host=args.host, port=args.port, threaded=True)
USB Camera [usbwebcamera.py]
usbwebcamera.py
import cv2
import threading
import time
import logging
import os
logger = logging.getLogger(__name__)
archive_path = os.path.join(os.path.dirname(os.path.realpath(__file__)), 'archive')
thread = None
class UsbWebCamera:
def __init__(self,fps=20,video_source=1):
logger.info("Initializing usb camera class with {fps} " + str(fps) + " and video_source={" + str(video_source) + "}")
self.fps = fps
self.video_source = video_source
self.camera = cv2.VideoCapture(self.video_source)
print( "1: width: {}, height : {}".format(self.camera.get(3), self.camera.get(4) ) )
#width=self.camera.get(cv2.CAP_PROP_FRAME_WIDTH)
#height=self.camera.get(cv2.CAP_PROP_FRAME_HEIGHT)
#print( "2: width: {}, height : {}".format(width, height) )
self.camera.set(cv2.CAP_PROP_FRAME_WIDTH, 640)
self.camera.set(cv2.CAP_PROP_FRAME_HEIGHT, 480)
# We want a max of 5s history to be stored, thats 5s*fps
self.max_frames = 5*self.fps
self.frames = []
self.isrunning = False
def run(self):
logging.debug("Perparing Usb Camera thread")
global thread
if thread is None:
logging.debug("Creating thread")
thread = threading.Thread(target=self._capture_loop,daemon=True)
logger.debug("Starting thread")
self.isrunning = True
thread.start()
logger.info("Thread started")
def _capture_loop(self):
dt = 1/self.fps
logger.debug("Observation started")
while self.isrunning:
v,im = self.camera.read()
#im = cv2.flip(im, 1)
#im = cv2.flip(im, 0)
if v:
if len(self.frames)==self.max_frames:
self.frames = self.frames[1:]
self.frames.append(im)
time.sleep(dt)
logger.info("Thread stopped successfully")
def stop(self):
logger.debug("Stopping thread")
self.isrunning = False
def get_frame(self, _bytes=True):
if len(self.frames)>0:
if _bytes:
img = cv2.imencode('.png',self.frames[-1])[1].tobytes()
else:
img = self.frames[-1]
else:
with open(archive_path+"/not_found.jpeg","rb") as f:
img = f.read()
return img
GPIO 프로그램 [gpioControl.py]
gpioControl.py
import RPi.GPIO as GPIO
from time import sleep
ina1 = 33
ina2 = 35
ena = 37
inb1 = 31
inb2 = 29
enb = 23
fire = 16
UpDownCam=12
RightLeftCam=18
GPIO.setmode(GPIO.BOARD)
GPIO.setup(UpDownCam, GPIO.OUT, initial=1)
GPIO.setup(RightLeftCam, GPIO.OUT, initial=1)
GPIO.setup(11, GPIO.OUT, initial=1) # light
GPIO.setup(ina1,GPIO.OUT)
GPIO.setup(ina2,GPIO.OUT)
GPIO.setup(ena,GPIO.OUT)
GPIO.setup(inb1,GPIO.OUT)
GPIO.setup(inb2,GPIO.OUT)
GPIO.setup(enb,GPIO.OUT)
p1 = GPIO.PWM(RightLeftCam, 50) # 50 Hz
p2 = GPIO.PWM(UpDownCam, 50) # 50
p1.start(0)
p2.start(0)
p1.ChangeDutyCycle(0)
p2.ChangeDutyCycle(0)
pa=GPIO.PWM(ena,1000)
pa.start(25)
pb=GPIO.PWM(enb,1000)
pb.start(25)
initVerticalVal = 6.9
initHorizontalVal = 6.6
verticalVal = initVerticalVal
horizontalVal = initHorizontalVal
cameraPositionX = initVerticalVal
cameraPositionY = initHorizontalVal
# Set up camera constants
IM_WIDTH = 640
IM_HEIGHT = 480
class GpioControl(object):
def __init__(self):
global verticalVal
global horizontalVal
global p1
global p2
p1.ChangeDutyCycle(verticalVal)
p2.ChangeDutyCycle(horizontalVal)
sleep(0.1)
p1.ChangeDutyCycle(0)
p2.ChangeDutyCycle(0)
print("> Init Vert=" + str(verticalVal) + ",Hort=" + str(horizontalVal))
def click(self):
GPIO.output(11, GPIO.LOW)
sleep(0.5)
GPIO.output(11, GPIO.HIGH)
sleep(1)
def __del__(self):
global p1
global p2
p1.stop()
p2.stop()
print(" GPIO.__del__() ")
GPIO.cleanup()
def startUp(self):
GPIO.setmode(GPIO.BOARD)
GPIO.setup(UpDownCam, GPIO.OUT, initial=1)
GPIO.setup(RightLeftCam, GPIO.OUT, initial=1)
GPIO.setup(ina1,GPIO.OUT)
GPIO.setup(ina2,GPIO.OUT)
GPIO.setup(ena,GPIO.OUT)
GPIO.setup(inb1,GPIO.OUT)
GPIO.setup(inb2,GPIO.OUT)
GPIO.setup(enb,GPIO.OUT)
p1.start(0)
p2.start(0)
p1.ChangeDutyCycle(0)
p2.ChangeDutyCycle(0)
pa.start(25)
pb.start(25)
def cleanUp(self):
global p1
global p2
p1.stop()
p2.stop()
print(" GPIO.cleanUp() ")
GPIO.cleanup()
sleep(2)
def initMotorPosition(self):
# Init
global p1
global p2
p1.ChangeDutyCycle(cameraPositionX)
p2.ChangeDutyCycle(cameraPositionY)
sleep(0.1)
p1.ChangeDutyCycle(0)
p2.ChangeDutyCycle(0)
print("> Init Vert=" + str(cameraPositionX) + ",Hort=" + str(cameraPositionY))
return "Vert=" + str(cameraPositionX) + ",Hort=" + str(cameraPositionY)
def moveUp(self):
global verticalVal
global horizontalVal
global p2
if(verticalVal<12):
verticalVal = round(verticalVal+0.2, 1)
p2.ChangeDutyCycle(verticalVal)
print("> UP Vert=" + str(verticalVal) + ",Hort=" + str(horizontalVal))
sleep(0.1)
p2.ChangeDutyCycle(0)
return "Vert=" + str(verticalVal) + ",Hort=" + str(horizontalVal)
def moveDown(self):
global verticalVal
global horizontalVal
global p2
if(verticalVal>5):
verticalVal = round(verticalVal-0.2, 1)
p2.ChangeDutyCycle(verticalVal)
print("> Down Vert=" + str(verticalVal) + ",Hort=" + str(horizontalVal))
sleep(0.1)
p2.ChangeDutyCycle(0)
return "Vert=" + str(verticalVal) + ",Hort=" + str(horizontalVal)
def moveRight(self):
global verticalVal
global horizontalVal
global p1
if(horizontalVal>2.5):
horizontalVal = round(horizontalVal-0.2, 1)
p1.ChangeDutyCycle(horizontalVal)
print("> Right Vert=" + str(verticalVal) + ",Hort=" + str(horizontalVal))
sleep(0.1)
p1.ChangeDutyCycle(0)
return "Vert=" + str(verticalVal) + ",Hort=" + str(horizontalVal)
def moveLeft(self):
global verticalVal
global horizontalVal
global p1
if(horizontalVal<10):
horizontalVal = round(horizontalVal+0.2, 1)
p1.ChangeDutyCycle(horizontalVal)
print("> Left Vert=" + str(verticalVal) + ",Hort=" + str(horizontalVal))
sleep(0.1)
p1.ChangeDutyCycle(0)
return "Vert=" + str(verticalVal) + ",Hort=" + str(horizontalVal)
def goForward(self,time):
print("Go forward")
pa.ChangeDutyCycle(75)
GPIO.output(ina1,GPIO.HIGH)
GPIO.output(ina2,GPIO.LOW)
pb.ChangeDutyCycle(75)
GPIO.output(inb1,GPIO.HIGH)
GPIO.output(inb2,GPIO.LOW)
sleep(0.1*int(time))
GPIO.output(ina1,GPIO.LOW)
GPIO.output(ina2,GPIO.LOW)
GPIO.output(inb1,GPIO.LOW)
GPIO.output(inb2,GPIO.LOW)
return " >> Go Forward"
def goBackward(self,time):
print("Go backward")
pa.ChangeDutyCycle(75)
GPIO.output(ina1,GPIO.LOW)
GPIO.output(ina2,GPIO.HIGH)
pb.ChangeDutyCycle(75)
GPIO.output(inb1,GPIO.LOW)
GPIO.output(inb2,GPIO.HIGH)
sleep(0.1*int(time))
GPIO.output(ina1,GPIO.LOW)
GPIO.output(ina2,GPIO.LOW)
GPIO.output(inb1,GPIO.LOW)
GPIO.output(inb2,GPIO.LOW)
return " >> Go Backward"
def goTurnleftback(self,time):
print("Go Turn Left back")
pa.ChangeDutyCycle(75)
GPIO.output(inb1,GPIO.LOW)
GPIO.output(inb2,GPIO.HIGH)
sleep(0.1*int(time))
GPIO.output(ina1,GPIO.LOW)
GPIO.output(ina2,GPIO.LOW)
GPIO.output(inb1,GPIO.LOW)
GPIO.output(inb2,GPIO.LOW)
return " >> Go Turn Left back"
def goTurnrightback(self,time):
print("Go Turn Right back")
pb.ChangeDutyCycle(75)
GPIO.output(ina1,GPIO.LOW)
GPIO.output(ina2,GPIO.HIGH)
sleep(0.1*int(time))
GPIO.output(ina1,GPIO.LOW)
GPIO.output(ina2,GPIO.LOW)
GPIO.output(inb1,GPIO.LOW)
GPIO.output(inb2,GPIO.LOW)
return " >> Go Turn Right back"
def goTurnleftforward(self,time):
print("Go Turn Left forward")
pa.ChangeDutyCycle(75)
GPIO.output(inb1,GPIO.HIGH)
GPIO.output(inb2,GPIO.LOW)
sleep(0.1*int(time))
GPIO.output(ina1,GPIO.LOW)
GPIO.output(ina2,GPIO.LOW)
GPIO.output(inb1,GPIO.LOW)
GPIO.output(inb2,GPIO.LOW)
return " >> Go Turn Left forward"
def goTurnrightforward(self,time):
print("Go Turn Right forward")
pb.ChangeDutyCycle(75)
GPIO.output(ina1,GPIO.HIGH)
GPIO.output(ina2,GPIO.LOW)
sleep(0.1*int(time))
GPIO.output(ina1,GPIO.LOW)
GPIO.output(ina2,GPIO.LOW)
GPIO.output(inb1,GPIO.LOW)
GPIO.output(inb2,GPIO.LOW)
return " >> Go Turn Right forward"
def move_to_position(self,ObjX, ObjY):
global cameraPositionX
global cameraPositionY
global p1
global p2
print(" >> Move to location x="+str(ObjX)+", y="+str(ObjY))
moveLoop = True
movX = int(IM_WIDTH/2)-ObjX
movY = int(IM_HEIGHT/2)-ObjY
print(" >> Center location movX="+str(movX)+", movY="+str(movY))
xx = 1
xy = 0
yx = 1
yy = 0
while(moveLoop):
if( xy < abs(movX) ):
p1.ChangeDutyCycle(cameraPositionX)
sleep(0.1)
p1.ChangeDutyCycle(0)
print("xx=" + str(xx) + ", xy="+ str(xy) +" cameraPositionX=" +str(round(cameraPositionX,1)))
xy = xx*xx * 12
xx = xx + 1
if(movX > 0): cameraPositionX = cameraPositionX - 0.2
else: cameraPositionX = cameraPositionX + 0.2
if( yy < abs(movY) ):
p2.ChangeDutyCycle(cameraPositionY)
sleep(0.1)
p2.ChangeDutyCycle(0)
print("yx=" + str(yx) + ", yy="+ str(yy) +" cameraPositionY=" +str(round(cameraPositionY,1)))
yy = yx*yx * 12
yx = yx + 1
if(movY > 0): cameraPositionY = cameraPositionY + 0.2
else: cameraPositionY = cameraPositionY - 0.2
elif( xy >= movX and yy >= movY):
print(" >> Center location movX="+str(movX)+", movY=" + str(movY))
print(" >> Position location xy="+str(xy)
+", yy="+str(yy)
+" cameraPositionX="+str(round(cameraPositionX,1))+
" cameraPositionY="+str(round(cameraPositionY,1))+" .. ")
moveLoop = False
def shooting(self):
GPIO.setup(fire,GPIO.OUT)
GPIO.output(fire,GPIO.HIGH)
sleep(0.5)
GPIO.output(fire,GPIO.LOW)
GPIO.cleanup()
self.startUp()
return "Fired !"
듣기와 번역하여 말하기 프로그램 [listenSpeech.py]
listenSpeech.py
의외로 간단 ㅎㅎ 구글님의 지원을 받아서
from google_trans_new import google_translator
from google_speech import Speech
from time import sleep
translator = google_translator()
class ListenSpeech(object):
def speech(self,message):
ko_result = translator.translate(message, lang_tgt='ko')
print(' -> ', ko_result)
speech = Speech(ko_result, 'ko')
speech.play()
en_result = translator.translate(message, lang_tgt='en')
speech = Speech(en_result, 'en')
speech.play()
it_result = translator.translate(message, lang_tgt='it')
speech = Speech(it_result, 'it')
speech.play()
ja_result = translator.translate(message, lang_tgt='ja')
speech = Speech(ja_result, 'ja')
speech.play()
cn_result = translator.translate(message, lang_tgt='cmn')
speech = Speech(cn_result, 'cmn')
speech.play()
returnString = ko_result + " , EN=" + en_result + " , IT=" + it_result + ", JA=" + ja_result + " , CMN=" + cn_result
print("Return message = " + returnString)
return returnString
화면 캡쳐 [capture.py]
capture.py
import cv2
import datetime, time
from pathlib import Path
def capture_and_save(im):
s = im.shape
# Add a timestamp
font = cv2.FONT_HERSHEY_SIMPLEX
bottomLeftCornerOfText = (10,s[0]-10)
fontScale = 1
fontColor = (20,20,20)
lineType = 2
cv2.putText(im,datetime.datetime.now().isoformat().split(".")[0],bottomLeftCornerOfText,font,fontScale,fontColor, lineType)
m = 0
p = Path("archive")
for imp in p.iterdir():
if imp.suffix == ".png" and imp.stem != "last":
num = imp.stem.split("_")[1]
try:
num = int(num)
if num>m:
m = num
except:
print("Error reading image number for",str(imp))
m +=1
lp = Path("archive/last.png")
if lp.exists() and lp.is_file():
np = Path("archive/img_{}.png".format(m))
np.write_bytes(lp.read_bytes())
cv2.imwrite("archive/last.png",im)
if __name__=="__main__":
capture_and_save()
print("done")
기타 프로그램 및 화면 소스
기타 프로그램 및 화면 소스
conf.py
from pathlib import Path
p = Path("logs")
if not p.exists():
p.mkdir()
dictConfig = {
'version': 1,
'disable_existing_loggers': True,
'formatters': {
'standard': {
'format': '%(asctime)s [%(levelname)s] %(name)s:: %(message)s',
},
},
'handlers': {
'default': {
'level': 'DEBUG',
'formatter': 'standard',
'class': 'logging.StreamHandler',
'stream': 'ext://sys.stdout',
},
'file': {
'class': 'logging.handlers.RotatingFileHandler',
'level': 'DEBUG',
'formatter': 'standard',
'filename': 'logs/logfile.log',
'mode': 'a',
'maxBytes': 5_242_880,
'backupCount': 3,
'encoding': 'utf-8',
},
},
'loggers': {
'__main__': {
'handlers': ['default','file'],
'level': 'DEBUG',
'propagate': False,
},
'camera': {
'handlers': ['default', 'file'],
'level': 'DEBUG',
'propagate': False,
},
}
}
폴더구조
/home/hyunsu/work ....

화면 소스